Author: Rong-Yuan Jou, National Formosa University
 Fig. 1 Implementation field and related facilities.
Fig. 1 Implementation field and related facilities.In this paper, as shown in Fig. 1, the dual-lens LED structured light vision module with the image acquisition lens, projection module and deep learning algorithm, and the UR5 robot arm are integrated into the three-dimensional measurement system to do the automatic PP-bag packages detection and to increase its measurement accuracy. Three experiments are conducted which are: (1) Object recognition- to evaluate the confidences of the deep learning algorithm for the PP-bag packages object identifications; (2) Cycle time experiment- to estimate the cycle times of using variable forces jaw assembly to pick/place the same PP-bag packages from a basket in order to show the stable inside hole diameter after clamping cycles; (3) Clamping force experiment- to investigate optimum clamping force to less affect the inner hole diameter when the same PP-bag package is pick and place repeatedly.
Based on the procedures shown in Fig.2, for PP-bag package recognition experiments, in training stage, image data is divided into four groups of images and trained by the same parameters. The trained model was implemented to identification experiments under four different ambient light intensities: 200~300lm, 400~500lm, 600~700lm, and 800~900lm, respectively, and for each illumination case, three combinations are generated, each one of which is with 4 kinds of PP-bag packages and is arranged in different locations in a basket. Then, the three baskets, each one is arranged with 4 different kinds of PP-bag packages are conducting the object recognitions by software under four illumination levels. Totally, each dataset contains 432 PP-bags for recognitions. The experimental results show that with images of dataset1 and the ambient illumination level of 200 lm to 800 lm, the matching score is up to 0.989.
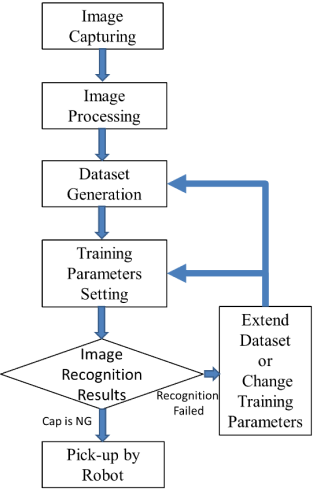 Fig. 2 Procedures of object recognitions by deep learning.
Fig. 2 Procedures of object recognitions by deep learning.For cycle time and clamping force experiments, as shown in Fig.3, the variable clamping jaw can adjust the clamping force and the opening degree to maintain the clamping force of the jaws at 20N, without damaging the inside hole structure and changing the hole diameter of PP-bag packages, making it impossible to reuse. And using the variable force jaw for 30 repeated clamping experiments, the inner hole diameters of PP-bag package can still be maintained within the standard range of 25mm or more, which is satisfy the requirements of mushroom PP-bag packaging processes.
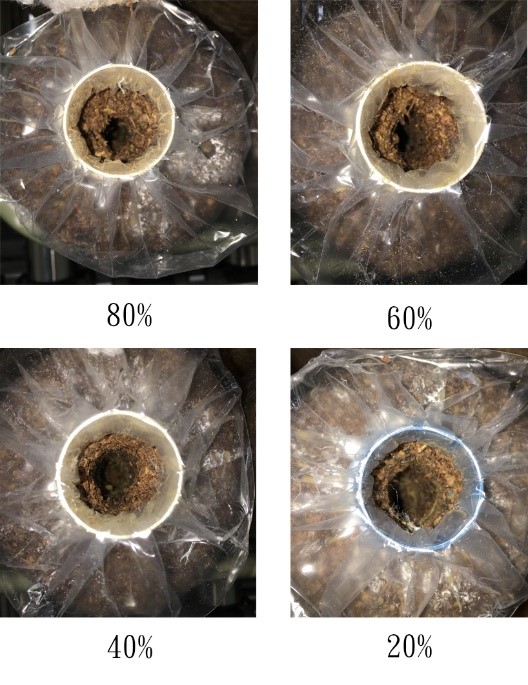 Fig. 3 Pictures of inner hole diameters subjected to different clamping forces.
Fig. 3 Pictures of inner hole diameters subjected to different clamping forces.