資料來源:水產試驗所/林志遠研究員
工研院中分院/吳崧毅工程師
本研究開發一部水產養殖自走車,因應養殖場域需求進行開發,自走車可依據規劃之路線進行移動,並於定點位置執行自動投擲飼料、投擲益生菌以、CCD取像及水質監測等作業。整部自走車技術開發包含移動載具開發、定位系統開發、資料庫建立、酬載系統開發以及相關分析系統。移動載具採用履帶式底盤,適用於室外或室內場域,並以室內UWB定位系統定位自走車位置,以磁軌系統輔助載具行走,於定點作業定量投料及水質監測與取像,再將作業資訊及監測資料上傳至雲端資料庫,可於網頁或LINE上觀看相關資訊。研究成果已申請我國新型專利,專利名稱:水產養殖電動感控定位自走車,申請立案案號:111214281。
現今海洋資源枯竭與污染日益嚴重,水產養殖因能提供高經濟價值且安全的水產品來源且可永續經營,成為相當重要的民生產業。然而,水產養殖業有人力老化及缺工嚴重的問題,面臨養殖成本高及成長率/存活率不穩定等挑戰。目前養殖作業時投餵飼料、益生菌或其他添加劑等投料管理,以及量測水質參數時,均需耗費大量人力與時間,且漁民普遍憑藉個人養殖經驗人工投料,不論對於體型較小的魚類(例如設施化養殖的觀賞魚或魚苗),或者對於傳統開放式魚塭中體型較大的魚,均難以精確控制其投料量,而可能影響成長率或環境水質。
再則,養殖環境若設置動態取像模組,再配合人工智慧AI演算,則可進一步獲得攝餌活動力及魚體大小與數量,以更精確自動控制投餌量,而可大量減少飼料成本的浪費。此外,養殖場一般具有多口魚池,且有不同配置環境,若利用自走車搭載上面自動投料、水質觀測及取像等設備,並彈性變換設定魚池間移動路徑及作業程序,則更可節省大量的人力成本。
爰此,專利研發主要目的在於揭露一種水產養殖電動感控定位自走車,可自動執行水產養殖管理作業。技術內涵包含一自走車載台系統與一自走車酬載系統;自走車載台系統具有載台輪式履帶傳動模組、輪框與軸承、載台底盤與載台感控單元。自走車酬載系統設置於自走車載台系統上並具有酬載感控單元、多軸懸臂升降旋轉模組與多桿伸縮模組,多桿伸縮模組為設置於多軸懸臂升降旋轉模組上。(圖一)
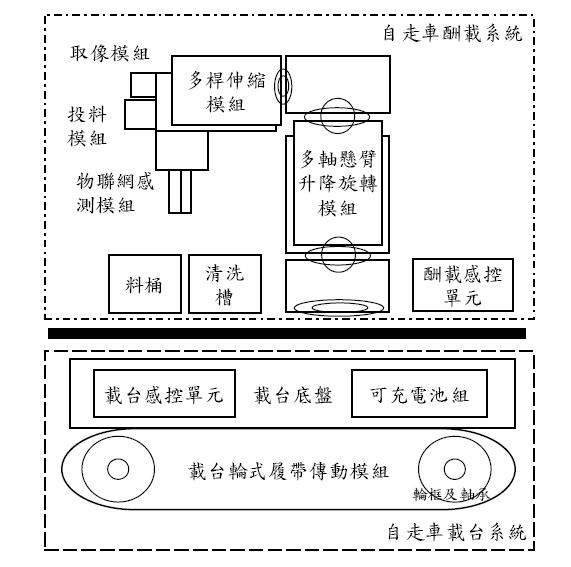 圖一、水產養殖定位感控自走車 - 結構示意圖
圖一、水產養殖定位感控自走車 - 結構示意圖此外,本專利中之載台感控單元(圖二)設置於該載台底盤並連結且控制該載台輪式履帶傳動模組傳動該輪框轉動而讓該自走車載台系統於可規劃設定之路徑上移動,可以控制該自走車載台系統自動移動至各養殖作業位置。酬載感控單元(圖三)則用於連結並控制該多軸懸臂升降旋轉模組與該多桿伸縮模組的運作,透過自走車酬載系統控制取像模組、投料模組及物聯網感測模組,來進行養殖管理作業。投料模組包含但不限於飼料、益生菌、添加劑、藥劑等..物料,物聯網感測模組則包含但不限於水質、微氣象、其他物理化學等..感測器。
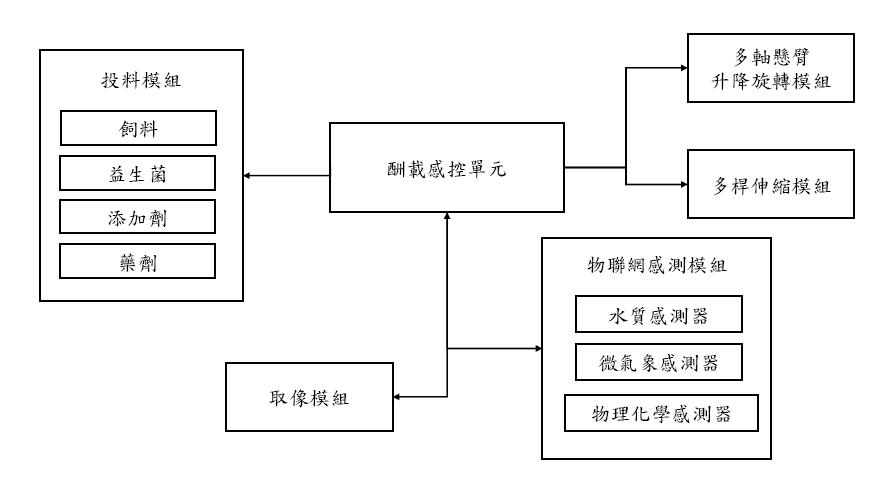 圖二、水產養殖定位感控自走車 - 酬載感控單元系統方塊圖
圖二、水產養殖定位感控自走車 - 酬載感控單元系統方塊圖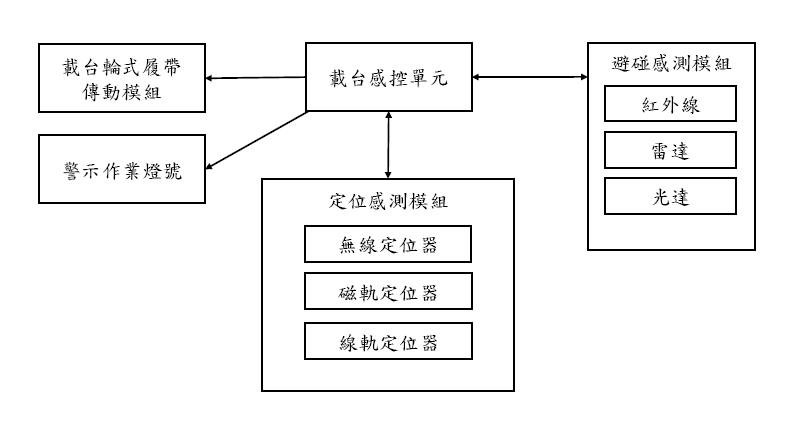 圖三、水產養殖定位感控自走車 - 載台感控單元系統方塊圖
圖三、水產養殖定位感控自走車 - 載台感控單元系統方塊圖開發完成之水產養殖自走車雛型已於彰化觀賞魚養殖場示範場域進行測試(圖四)與相關業界觀摩。透過自動化省工機械導入,可讓該公司能更有效的將人力進行配置,讓自動化農業機械取代水質監測等勞力工作,後續可應用於更多室內養殖場域,或與漁電共生的場域結合,讓漁電共生場域上方裝設太陽能板所吸收之能量提供自走車充電使用,形成一個創能、省工、省力及精準養殖之養殖區域。
 圖四、水產養殖定位感控自走車–實體雛形場域示範
圖四、水產養殖定位感控自走車–實體雛形場域示範▲研發團隊:水產試驗所/林志遠研究員、工研院中分院/吳崧毅工程師
聯絡人:水產試驗所/林志遠研究員
電話:(02)24622101#2503
E-mail:cylin@mail.tfrin.gov.tw