資料來源:國立虎尾科技大學/周榮源特聘教授、邱弘丞、農業試驗所/石信德研究員
蕈菇產業為台灣一項重要產業,為台灣創造了許多經濟價值。太空包為台灣最廣泛使用的菇類栽培模式,袋栽菇類生產過程可粗分為三大階段:第一階段製包,第二階段滅菌與接菌,第三階段走菌與出菇。製包為製作杏鮑菇太空包,使用耐高溫塑膠袋,填入栽培基質,裝套環及壓蓋,形成的太空包。滅菌是使用殺菌釜以高溫高壓方式去除太空包裡的病菌。接菌是在已殺菌之太空包內,將菌種值入太空包內。接菌後的太空包等待20~30天,到白色菌絲長滿整個太空包,是為走菌。之後,將已走菌之太空包開包,等待原基形成其子實體,成長成熟完畢,是為出菇,時間約為 15~20 天。
在走菌與出菇時,環境條件,如溫濕度及二氧化碳濃度,對菇的成長有決定性的影響。傳統的菇類產業,需要依靠大量的人力進行巡檢工作,庫房內狹窄潮濕,空氣中擴散的孢子,對菇農的呼吸道造成影響。將智慧農業應用在菇類產業上,可大幅減低人力需求,達到自動化生產的目標。
本研究設計的自主移動式智慧物聯平台,一台小型電腦(ASUS Mini PC PB60G)為整個系統的主控電腦,以USB界面連接網路攝影機(羅技Logitech C525), 熱顯像感測器(PureThermal 2 with Lepton 3.5),光學雷達(RPLiDAR A1),機械手臂系統(Open MANIPULATOR-X),及底盤驅動系統(?). 另有ESP32開發板(ESP32 DOIT DEVKIT),連接工業級溫濕度感測器(宇田科技 eYc THS13)及二氧化碳感測器(是宇田科技 eYc GS43),讀取感測資料,無線傳送到物聯網頁伺服器。該物聯資料伺服器,可以是雲端電腦或是單機伺服器,本研究用簡單的Raspberry Pi 4B單板電腦,執行Apache伺服器程式,使用php語言,連接後端MySQL資料庫,提供物聯資料伺服服務,置於移動平台上,見圖1。
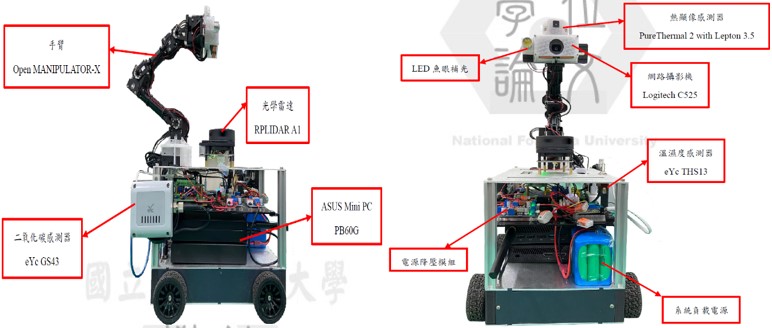 圖1. 自主移動式智慧物聯平台
圖1. 自主移動式智慧物聯平台主控電腦透過USB連接STM32控制板,主控電腦上有一個底盤控制節點(/base_control),是底盤系統的驅動程式,可以讀取底盤感測器資料,也可以傳送驅動命令給底盤。底盤控制節點根據編碼器及九軸傳感器資料,發佈里程資訊(位置及方向)到ROS系統內,包括nav_msgs/Odometry 訊息與"odom" 座標對"base_link"座標的轉換。ROS系統內有一個鍵盤遙控(teleoperation)節點(/teleop_twist_keyboard),可發布前進速度與轉向速度(/cmd_vel)訊息,操作底盤的運動。
主控電腦上有一光學雷達節點(/rplidarNode),是光學雷達驅動程式,控制USB連線的RPLiDAR A1光學雷達。光學雷達利用紅外線發射與接收的時間差來計算與物體之間的距離,產生的2D點雲數據可用於場域製圖與定位。(/rplidarNode) 節點發布訊息到主題(/scan),供需要的節點訂閱。
ESP32控制器將量測資料,以http協定,透過Wi-Fi,傳到物聯資料伺服器,存於伺服器內MySQL資料庫(見圖2)。MySQL資料庫內的資料,用可視化軟體Grafana,以圖表方式呈現。本研究另透過IFTTT,將感測的環境數據,即時的用LINE Notify通知管理者。圖3是本平台在農試所測試的數據呈現。
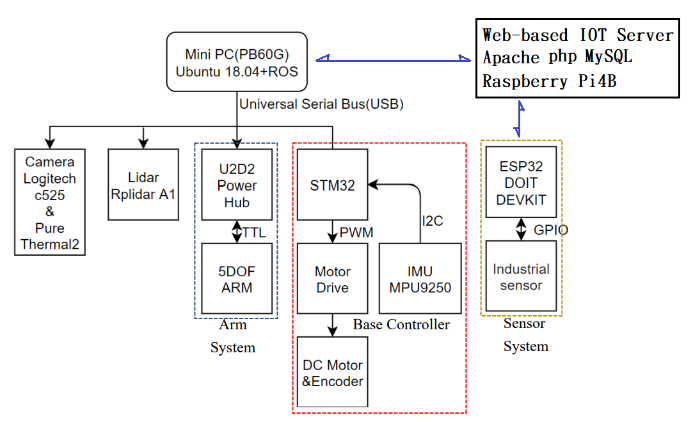 圖2.系統架構圖
圖2.系統架構圖 圖3. 資料圖表呈現
圖3. 資料圖表呈現本研究利用網路攝影機(Logitech C525)與手機(Apple iPhone 11)進行菇場圖像拍攝,分別為A廠杏鮑菇 1500 張、B廠整籃杏鮑菇 239 張及C廠杏鮑菇 100 張,總拍攝數量共 1839 張,如圖4所示。
 圖4. 菇場取樣
圖4. 菇場取樣本研究使用YOLO V4v4 神經網路來訓練杏鮑菇物件偵測。經過之前菇場取樣標註的圖片訓練之後,用來辨識學校菇場模擬場域定點取像上的杏鮑菇並計數,如圖5所示。
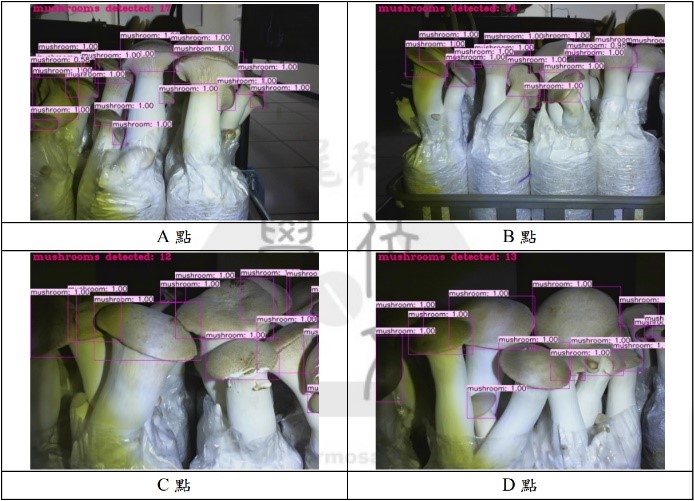 圖5. 杏鮑菇辨識與數量的計算
圖5. 杏鮑菇辨識與數量的計算結論
本研究將自主移動機器人技術導入菇類栽培產業,利用自行設計發展的自主移動式智慧物聯平台,在測試場域進行場域地圖建置、場域自主導航、場域環境感測數據蒐集及上傳,並利用 YOLO V4v4 神經網路,以自行建置的杏鮑菇圖像資料集訓練,達到了在測試場域完成多點巡航與拍照,實現杏鮑菇物件偵測與數量計數的目的。本文研究設計發展之自主移動式智慧物聯平台為原型樣機,若要實際應用在菇類栽培環境,對於機體的防潮防水方面需要克服,期望有朝一日能夠實際應用於菇類栽培產業,讓菇類生產管理者在外即可知悉菇場場域的生產狀況,並可以透過遠端進行場域的環境控制,以達到生產智動化、最佳效率的願景。
▲研發團隊:國立虎尾科技大學機械設計工程系(工程系統設計實驗室) /農業部農業試驗所菇類實驗室
聯絡人:周榮源 特聘教授
電話:05-6315364
E-mail:ryjou@nfu.edu.tw